How to resolve AdBlock issue?
How to resolve AdBlock issue?
How to resolve AdBlock issue?
How to resolve AdBlock issue?
|
||||
| Nachrichten und Informationen zu Test- und Messtechnik für Elektronik in Entwicklung, Produktion und Service. | ||||

HauptmenüNewsletter abonnierenNews-BereichInfo-BereichWeblinksMarktübersichten |

Top 5 News der letzten 30 Tage
Aktuelle Test- und Messtechnik-News
Hintergrund: Genaue zeitliche Synchronisation von Messgeräten
Bereits 1985 wurde von David L. Mills an der Universität von Delaware das NTP-Protokoll (Network Time Protocol) entwickelt und als RFC 958 veröffentlicht. Mit diesem Protokoll ließen sich mehrere Rechner an die Zeit eines Zeitservers angleichen. Die Genauigkeit, die hierbei erreicht wird, liegt im Mikrosekunden-Bereich (10E-6 Sekunden) und war für die damalige Zeit ausreichend. Bereits 1990 wurde im Test- und Messtechnik-Bereich die Notwendigkeit von deutlich genaueren Systemen erkannt. Zu dieser Zeit waren zwar auch schon GPS-Systeme verfügbar, die eine deutlich bessere Genauigkeit bereitstellen konnten, jedoch war diese Alternative preislich nicht attraktiv. Zusätzlich sollten die Anforderungen an eine verbesserte Genauigkeit mit der vorhandenen Infrastruktur erreicht werden. So wurde Anfang der 90ziger Jahren bei Hewlett-Packard eine Arbeitsgruppe um John C. Eidson gegründet, die ein Konzept zur Verbesserung des NTP-Standards ausarbeiten sollte. Die im Jahr 2000 von John C. Eidson veröffentlichten Ergebnisse waren für die Messtechnik-Firmen so interessant, das man einen eigenen IEEE Standard für diese neue Art von Zeitsynchronisation ins Leben rufen wollte. 2002 war es dann soweit, die IEEE 1588-2002 war fertiggestellt und freigegeben. Mit Hilfe dieses Standards sollten nun Genauigkeiten im Sub-Mikrosekunden Bereich möglich werden. 2008 wurde dann der Standard nochmals an die aktuellen Anforderungen angepasst und als IEEE 1588-2008 festgeschrieben. Dieser Standard ist bis heute gültig. Zur Zeit arbeitet die IEEE Working Group an einer neueren Version des Standards. Folgende Anforderungen wurden für den neuen Standard identifiziert:
Doch nicht nur in der IEEE Working Group wurde an der Verbesserung des Standards gearbeitet. Ein Zusammenschluss verschiedener Institutionen und Unternehmen, darunter die CERN-Forschungsorganisation, das GSI Helmholtz-Zentrum für Schwerionen Forschung und die Firma National Instruments, haben den Standard für ihre Anforderungen weiterentwickelt und unter dem Projektnamen „White Rabbit“ [3] veröffentlicht. Die Ziele des White Rabbit-Projektes waren [4]:
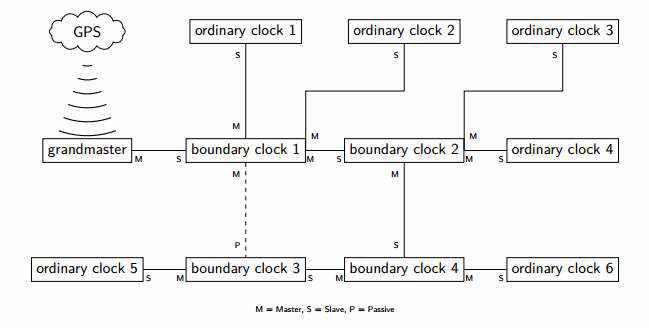
Die aktuelle Version 2.0 des White Rabbit Standards wurde 2011 unter der "CERN Open Hardware License" veröffentlicht. Derzeit wird dieser Standard bereits in verschiedenen Projekten eingesetzt. CERN verwendet den Standard für ein Steuerungssystem des "Large Hadron Collider" und für sein Neutrino - Teleskop KM3Net im Mittelmeer und das "GSI Helmholtzzentrum für Schwerionenforschung" nutzt es für den Partikel Beschleuniger FAIR. Um den IEEE 1588 Standard besser verstehen zu können, sollte man sich die Probleme vor Augen führen, wieso eine derartig genaue Zeitsynchronisation so komplex sein kann. Im Grunde bestehen mehrere Probleme: 1) Jede Uhr innerhalb eines Computers ist als Zähler implementiert. Es werden die Takte einer Taktquelle gezählt und über die Frequenz der Taktquelle die Uhrzeit errechnet. Da Taktquellen nie einen konstanten Takt erzeugen können, können auch zwei parallel laufende Taktquellen nie den identischen Takt haben. Somit ist eine Anpassung der Taktfrequenz des Slaves zum Master notwendig. 2) Das im Regelfall verwendete Ethernet entspricht weitestgehend der IEEE 802.3. Ethernet kann leider keine zeitlich deterministische Verbindung zwischen zwei Rechnern bereitstellen. Die Laufzeiten können von Sendung zu Sendung variieren. Somit können auch die Laufzeiten der Synchronisationsdaten variieren, was zu Fehlern bei der Synchronisation führen kann. 3) Die Laufzeiten innerhalb der Rechner, also in den Treibern und den Network-Stacks der Betriebssysteme, sind ebenfalls nicht deterministisch. Moderne Betriebssysteme arbeiten mit „preemtive scheduling“, was heißt, dass jeder Prozess innerhalb des Betriebssystems unterbrochen werden kann und zu einer anderen Zeit fortgesetzt wird. Somit können Verarbeitungszeiten innerhalb des Betriebssystems nicht mehr deterministisch vorhergesagt werden. Diese Unschärfe führt wiederum zu Fehlern in der Zeitsynchronisation und muss berücksichtigt werden. 4) Als Übertragungsmedien muss ein Consumer Produkt (Netzwerkkarte, Netzwerk-Chip) verwendet werden. Es müssen die bestehenden Infrastrukturen (Netzwerke) genutzt werden. Es darf also keine eigenständige Hardware für die Zeitsynchronisation erforderlich sein. Der IEEE-1588-2008 Standard enthält verschiedene Aspekte der Synchronisation und ihrer Umgebung. Zuerst werden die Geräte in den Netzwerken (PTP-Domänen) und deren Anordnung betrachtet. Geräte oder Knoten in einer PTP-Domäne die eine PTP-Funktionalität enthalten, werden als „Clocks“ bezeichnet und können in vier verschiedenen Varianten auftreten.
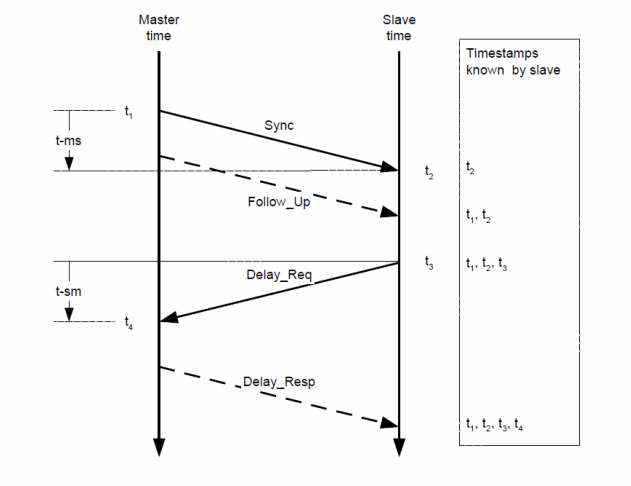
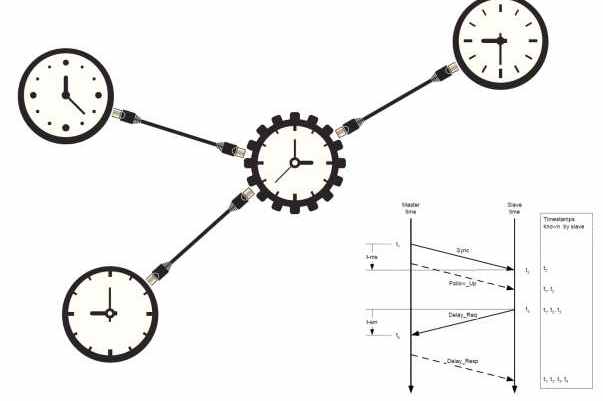
Bild 1: Schematischer Aufbau eines PTP-Netzwerks [2] Ordinary Clock: Eine „Ordinary Clock“ ist eine einfache Uhr (ein Port, meist ein Client), der als Slave mit einem Master verbunden ist und seine Zeit an diesen angleicht. Boundary Clock: Eine „Boundary Clock“ ist eine Uhr die mehrere „Ordinary Clocks“ enthält (mehrere Ports) und die als Master mehrere Slaves mit ihrer Zeit synchronisieren kann. Die „Boundary Clock“ kann aber auch als Slave mit einem Master verbunden sein und ihre Zeit an dessen angleichen. Transparent Clock: Eine „Transparent Clock“ ist eine Uhr, die nicht aktiv in die Zeitsynchronisation eingreift, sie ist mehr eine Hardware, die die Zeitsynchronisation-Datenpakete vermittelt, typischerweise ein Netzwerk Switch. „Transparent Clocks“ korrigieren die Zeitstempel innerhalb der Datenpakete, um die Verweildauer innerhalb der Hardware. Grandmaster Clock: Die Grandmaster Clock ist eine „Ordinary Clock“, die normalerweise Zugang zu GPS oder einer anderen sehr genauen Zeit hat und diese sehr genaue Zeit für alle untergeordneten Knoten bereitstellt. Innerhalb des PTP-Netzwerks kann jede Clock (Port) entweder als Master oder Slave agieren. Innerhalb einer PTP-Domäne kann es aber immer nur einen Master geben. Der Master verteilt aktiv seine Zeit an die Slaves. Er ist somit für die Synchronisation der Slaves in seiner PTP-Domäne zuständig. Ein Slave ist ein passives Element, der auf die Zeitsynchronisation-Anfragen des Masters antwortet. Grundsätzlich kann jede Clock (Port) innerhalb von PTP als Master oder Slave arbeiten. Die Entscheidung, ob die Clock als Master oder Slave arbeiten muss, wird beim Betreten des PTP-Netzwerks ermittelt. Hierzu wurde der „Best Master Clock“-Algorithmus in IEEE 1588 Standard definiert. Dieser Algorithmus regelt, dass die Clock mit der besten Genauigkeit, die Rolle des Masters übernimmt. Die Synchronisation der Uhrzeit zwischen Master und Slave wird über sogenannte „Event Messages“ durchgeführt. Diese Messages werden über das UDP Netzwerkprotokoll im Netzwerk vom Master verteilt und von Slaves beantwortet. Es existieren zwei verschiedene Verfahren für die Synchronisierung, die „One-Step “ Synchronisierung und die „Two-Step“ Methode. Der Unterschied in den beiden Methoden liegt in der Anzahl der Nachrichten, welche ausgetauscht werden müssen und ist im folgenden Diagramm zu sehen. Die „Two-Step“ Methode verschickt vier Nachrichten um einen Synchronisationsschritt durchzuführen. Dahingegen braucht die „One-Step“ Methode nur drei Nachrichten, was aber nur mit äußerst guter Hardware-Unterstützung möglich ist und somit nicht in jeder PTP Domäne gegeben sein kann. Damit ein Slave die Synchronisierung durchführen kann, sind lediglich vier Zeitstempel (t1, t2, t3, t4) nötig. Die Zeitstempel werden jeweils beim Senden oder Empfangen bestimmter Nachrichten generiert. Der Slave erhält diese vier Zeitstempel durch den Austausch der folgenden „Messages“:
Das nachfolgende Diagramm zeigt den genauen Ablauf der PTP-Kommunikation und den damit verbunden Austausch der benötigten Zeitstempel. Die Erfassung der Zeitstempel t1 und t4 geschieht auf der Seite des Masters und wird mit den Nachrichten an die Slaves gesendet. Damit dieser Knoten zum Schluss seine vier Zeitstempel besitzt, werden t2 und t3 Slave-seitig bei Empfang der Master Nachrichten erstellt.
Bild 2: Schematischer Ablauf der Messages[1] Mit Hilfe der Zeiten t1, t2, t3, und t4 kann nach dem Austausch der Nachrichten der „meanPathDelay“ berechnet werden. Der „meanPathDelay“ gibt an, wie lange eine Message für die Übertragung im Netzwerk gebraucht hat, also die Verzögerung. Wie an der nachfolgenden Formel zu sehen ist, geht IEEE 1588 davon aus, dass die Latenzzeit im Netzwerk für Senden und Empfangen identisch ist.
Bild 3: Formel zu Berechnung des meanPathDelay [2] Somit dient der „meanPathDelay“ zur Laufzeitkorrektur (im Netzwerk) für die Berechnung des eigenen Zeit-Offsets. Wenn man das obige Diagramm betrachtet, kann man zum Schluss kommen, dass der berechnete „meanPathDelay“ umso genauer ist, je näher der Zeitstempel tn an der Hardwareschnittstelle gesetzt oder ermittelt wird. Diese Beobachtung führt dann sehr schnell zur Erkenntnis, dass ein Teil der IEEE 1588 Funktionalität idealerweise in den entsprechenden Netzwerkchips untergebracht werden sollte. 2012 hat Intel dann ihre Netzwerkchips der Intel Reihe I21x vorgestellt, die erstmals eine Unterstützung für IEEE 1588 enthielten. Mit der Vorstellung dieser Netzwerkchips war nun auch der Zeitpunkt gekommen, um über kommerzielle Lösungen im Test- und Messtechnik-Bereich (T&M) nachzudenken. Intel hatte mit diesem Consumer Chipsatz erstmals die Möglichkeit geschaffen, für eine breite Palette an Geräten die Verwendung von IEEE 1588 zu ermöglichen. Diese Netzwerkchips enthalten alle zeitkritischen Teile des IEEE 1588 Standards:
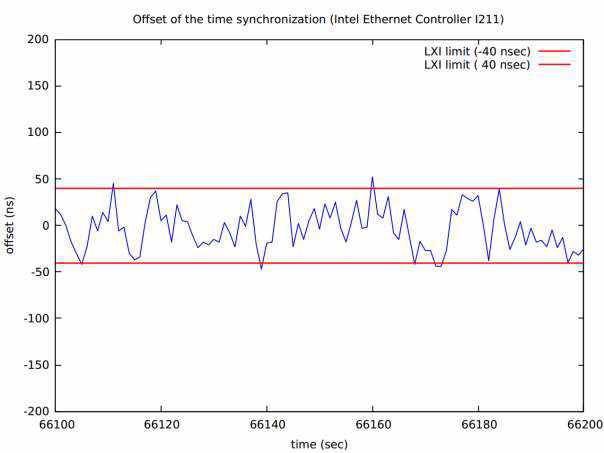
Unter Linux existieren bereits einige Implementierungen von unterschiedlicher Qualität. Für das Betriebssystem Windows existieren jedoch keinerlei Treiber von Microsoft oder Intel, um diese Funktionalität der Intel I21x Netzwerkchips zu unterstützen. Zwar sind einige käufliche Implementierungen erhältlich, die preislich jedoch nur eingeschränkt attraktiv sind. Mit Hilfe der Intel I21x Netzwerkchips lassen sich mit geringem Aufwand schon hervorragende Zeitsynchronisationen in zweistelligen Nanosekunden Bereich erreichen, die auch langzeitstabil gehalten werden können.
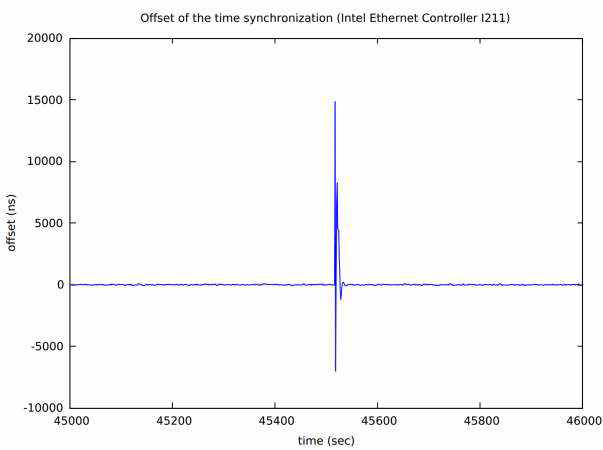
Bild 4: Messung des Slave Offsets über 100 Sekunden [2] Wie das Diagramm oben zeigt, schwankt der Offset zwischen Master und Slave immer um den Nullpunkt. Aufgrund des berechneten Offsets muss die aktuelle Uhrzeit des Slaves angepasst werden. Wie leicht einzusehen ist, kann nicht einfach die Uhrzeit korrigiert werden, also der ermittelte Offset direkt angewandt werden, da die Zeit dann in die Vergangenheit oder Zukunft springen würde. Ein sinnvolleres Vorgehen ist hier, den Takt des Zählers im Slave zu manipulieren. Die Intel I21x Chips haben hierzu ein spezielles Register, mit dem die Frequenz des Zählers indirekt angepasst werden kann. Der Intel I21x Chip aktualisiert alle 8 ns seine lokale Uhr um 8 ns, zusätzlich kann ein Offset von n x 2E-31 ns definiert werden, die bei jedem dieser Updates hinzuaddiert werde. Dieser Offset ist vorzeichenbehaftet und kann somit zu Verkleinerung oder Vergrößerung der Zählerfrequenz verwendet werden. Aufgrund des Offsets zum Master können nun der entsprechende Fehler in der Frequenz und die somit notwendige Frequenzanpassung ermittelt werden. Der zugrunde liegende Algorithmus der Frequenzanpassung ist maßgeblich für die Stabilität der Uhr verantwortlich. Innerhalb des Netzwerkes kann es auch zu Störungen kommen, die letztlich die Stabilität der Clock beeinflussen. Das unten aufgeführte Diagramm zeigt Störungen, die von Netzwerk-Kollisionen und die sich dadurch ergebenden Übertragungswiederholungen im Ethernet entstanden sind.
Bild 5: Messung des Slave Offsets über 100 Sekunden [2] Um derartige Störgrößen erkennen und bewerten zu können, kann zum Beispiel ein Kalman-Filter eingesetzt werden. Im T&M Bereich werden heute noch viele Messaufgaben mit Hilfe des klassischen Vorgehens gelöst. Mit Hilfe der genauen Zeitsynchronisation über IEEE 1588 ergeben sich nun aber viele neue und interessante Lösungsansätze. Wenn man sich vor Augen hält, dass ein Triggersignal ca. 5 ns Laufzeit pro Meter benötigt, kann man sich sicherlich einige Messaufgaben vorstellen, die mit Hilfe der IEEE 1588 Zeitsynchronisation besser und genauer gelöst werden können. Bei Messaufgaben, die beispielsweise mit Satellitensignalen zu tun haben, kann es durchaus vorkommen, dass Messgeräte 100 und mehr Meter voneinander entfernt sind, hier wäre der Ansatz mit IEEE 1588 sicherlich eine Alternative. Auch im Zuge der zunehmenden Verbreitung der IoT-Sensoren und der Offline-Messdatenaufnahme, wäre eine genaue und stabile Zeitsynchronisation der einzelnen Messsensoren von großem Vorteil. Somit können die einzelnen IoT-Sensoren kontinuierlich ihre Daten liefern und zum Beispiel in einer Cloud ablegen. Diese Daten können dann bei einer Offline-Messdatenauswertung über den Zeitstempel, der bei der Messung erstellt worden ist, einfach korreliert werden. Da IEEE 1588 auch zeitgesteuerte Events definiert, können zum Beispiel mehrere Geräte miteinander Sequenzen von Messaufgaben abarbeiten, ohne umständlich mit Triggerleitungen oder ähnlichem verbunden sein zu müssen. So könnte zum Beispiel ein Signalgenerator seine Frequenzliste zeitgesteuert abarbeiten und der zugehörige Analysator seine Messungen durchführen. Beide Aufgaben würden dann durch die zeitgebundenen Events gesteuert werden. Auch im Bereich Mobilfunk kann man mit dem Einsatz von IEEE 1588 sicherlich verschiedenste Messaufgaben deutlich einfacher realisiert werden, da die zeitliche Kopplung zwischen Basisstation und Mobilfunkgerät bei diversen Messaufgaben von Relevanz ist. Diese Anwendungsbeispiele hören sich im ersten Ansatz alle sehr vielversprechend an, basieren jedoch auf der Annahme, dass auch die Messgeräte-Hersteller diesen Standard in ihren Geräten implementiert haben. Selbst wenn alle den IEEE 1588 Standard verwenden würden, ist immer noch eine weitergehende Standardisierung notwendig, um die einzelnen Aktionen und Aufgaben zu koordinieren. Um dies den Messgeräte-Herstellern zu erleichtern, wurde 2004 der LXI Standard (LAN eXentsion for Instruments) von dem führenden Messgeräte-Hersteller ins Leben gerufen. 2008 wurde dann im LXI Standard der IEEE 1588 Standard mit aufgenommen und zusätzlich um einige Erweiterungen, wie die LAN Event Messages, erweitert. Mit diesem Standard können die Messgeräte-Hersteller die Vorteile von IEEE 1588 in Messgeräten effizient nutzen. Bis zur Vorstellung der Intel I21x Netzwerkchips war immer kostenintensive oder eigenentwickelte Hardware notwendig, um den IEEE 1588 Standard in den Messgeräten zu integrieren. Mit den Intel Netzwerkchips bietet sich nun erstmals die Möglichkeit diesen Standard mit Consumer Elektronik zu realisieren. Bereits 2014 entschied das LXI Konsortium für Ihre Mitglieder ein Referenz Design bereitzustellen, um die Verwendung des Standards weiter zu verbreiten. Nachdem im LXI Referenz Design 2016 die Core-Funktionalität des Standards verfügbar waren, begann das LXI Konsortium mit der deutschen Firma TSEP die Möglichkeit einer Referenz Implementierung der LXI Time Synchronisation (entspricht IEEE 1588) zu evaluieren und einen Prototypen zu erstellen. Im Februar 2017 wurde dann von TSEP auf einem der regelmäßigen Treffen des LXI Konsortium in den USA der erste Prototyp vorgestellt. Sowohl unter Linux als auch unter Windows war der Prototyp auf einem käuflichen Rechnerboard mit Intel I211 Chip lauffähig. Für den Linux-Prototyp wurde das Linux Packet „LinuxPTP“ verwendet. Die Implementierung der eigentlichen Clock Funktionalität war aber nicht ausreichend, um die geforderten Rahmenbedingungen des LXI und IEEE 1588 Standards zu erfüllen. TSEP hat deshalb dieses nachimplementiert. Der Regelalgorithmus zur Frequenznachführung der IEEE 1588 Clock wurde dabei komplett neu entwickelt und optimiert. Wie bereits erwähnt, bietet Windows keinerlei Unterstützung für IEEE 1588, deshalb wurde sowohl die komplette Clock Funktionalität als auch der Treibersupport von TSEP erstellt. TSEP hat hierfür die notwendigen Treiber für die Ansteuerung der Intel I21x Netzwerkchips für das Timestamping und das Erkennen von IEEEE 1588 Paketen im Windows Network Stack verankert. Sowohl unter Windows 7 als auch unter Windows 10 konnte diese Funktionalität getestet werden. Die ersten Gespräche mit dem LXI Konsortium über die Bereitstellung der LXI Time Synchronisation (entspricht IEEE 1588) waren durchweg positiv und werden wahrscheinlich zu einer kostenlosen Bereitstellung für LXI Mitglieder in diesem Jahr führen. TSEP plant zusätzlich seine Implementierung für andere Interessenten, die nicht LXI Mitglieder sind, bereitzustellen. Zusammenfassend kann gesagt werden, dass mit dem kommerziellen Einsatz der Intel I21x Netzwerk-Chips es nun möglich ist, IEEE 1588 in T&M Geräten einzusetzen. Die neuen Lösungsansätze, die sich mit IEEE 1588 ergeben, erweitern die Möglichkeit Messaufgaben im T&M Bereich zu lösen um eine neue Dimension. Wird zusätzlich noch Erweiterungen wie der LXI Standard in T&M Geräten angeboten, lassen sich komplexe Messaufgaben einfacher und effizienter strukturieren. Selbstkonfigurierende Systeme sind mit diesen Ansätzen nun möglich, da Geräte Daten und Aktionen Netzwerk-weit konfigurieren, austauschen und auslösen können. Es bleibt abzuwarten, wie die Messgeräte-Hersteller auf diese neue Technologie reagieren, ein großes Potenzial steckt allemal in ihr.
Literaturverzeichnis: [1] IEEE. Ieee standard for a precision clock synchronization protocol for networked measurement and control systems, 2008. [2] Bachelor Arbeit von Dominik Richstein, „Usability of the Intel Ethernet Controllers I210, I211 and I350 for the LXI Extended Function Clock Synchronization“ [3] CERN. White rabbit specification: Draft for comments, 06.07.2011. [4] White Rabbit Project. White rabbit wiki, 2016.
Autoren: Peter Plazotta, Dipl. Ing. (FH) CEO von Technical Software Engineering Plazotta (TSEP) und seit 30 Jahren mit dem Design und der Entwicklung von Systemsoftware vor allen im den Bereichen T&M, Telekommunikation und Automotive beschäftigt.
Dominik Richstein, B. Sc, Studierte an der Technischen Universität von Ingolstadt und hat seine Bachelorarbeit über das Thema IEEE 1588 und Intel I21x Netzwerk-Chips bei TSEP geschrieben.
Weitere News zum Thema:Englische Meldungen von www.All-about-Test.eu
|

Aktuelle Termine Weitere Veranstaltungen...
Tag CloudBoundary Scan
* JTAG
* Funktionstest
* Oszilloskop
* AOI-Test
* PXI
* Automotive
* EMV-Messtechnik
* Inspektion
* Röntgeninspektion
* In-Circuit-Test
* Batterietest
* LXI
* Stromversorgung
* Flying
* Photovoltaik
* LTE
* CAN
* Solarzellen
* Handheld
* Netzwerkanalysator
* Emulation
* ICT
* SPI
* Schaltmodul
* Leistungsmessung
* Spektrumanalysator
* FlexRay
* USB
* Traceability
* Manufacturing Execution System
* Testadapter
* Flying Prober
* Steuergerät
* |
||
|
© All about Test seit 2009 |
||||

 Die Zeitsynchronisation von mehreren Rechnern oder Messgeräten in einem Netzwerk ist eine gewisse Herausforderung. Was auf den ersten Blick als trivial erscheint, ist bei genauerer Betrachtung ein durchaus komplexes Problem. Eine genaue Synchronisation ist meist bei verteilten Messlösungen unverzichtbar und aus Kostengründen steht in der Regel dafür nur die vorhandene Netzwerkinfrastruktur zur Verfügung.
Die Zeitsynchronisation von mehreren Rechnern oder Messgeräten in einem Netzwerk ist eine gewisse Herausforderung. Was auf den ersten Blick als trivial erscheint, ist bei genauerer Betrachtung ein durchaus komplexes Problem. Eine genaue Synchronisation ist meist bei verteilten Messlösungen unverzichtbar und aus Kostengründen steht in der Regel dafür nur die vorhandene Netzwerkinfrastruktur zur Verfügung.